The FW12, which featured our first transverse gearbox, was designed exclusively for active ride. In Brazil we qualified second only to Senna in the McLaren with Honda power but the first half of the season was dogged with problems cooling the engine oil, and with instability and bouncing – most of which was connected to the active-ride system. At Silverstone we converted the cars back to passive suspension between Friday afternoon and Saturday morning, no easy task as the active ride actuators had to be converted into spring damper units. Nigel qualified well, however, and came second in the race.
We ‘retired’ the active ride for the rest of the year. It was clear we still had some system problems to solve, in hardware and in the sophistication of the control software.
For 1990 we established a separate test programme for active ride, the system being installed in an FW13B. Frank Dernie had moved on to Lotus to join Nelson at the end of 1988, and Paddy Lowe took over overall responsibility for development. Steve Wise designed a new Williams controller and data recorder with more advanced processors.
This was a buoyant team, with David Lang and Paddy Lowe working hard on the development and seeing good progress. Mark Blundell, whose sense of humour certainly helped it along, did the bulk of the testing miles. In its earliest form the system was prone to leaks and David Lang recalls a test day at Pembrey in South Wales when Blundell hid a leek in the cockpit.

Blundell did bulk of 1990 testing on active suspension
Getty Images
He went out and reported over the radio that there was a ‘massive leak’ in the system and that he was coming in immediately. Paddy Lowe was obviously concerned and mechanic John Cadd removed the inspection hatch, peered in, and confirmed that yes, there was a leek. He then reached in and produced the Welsh vegetable much to Paddy’s relief – and everyone else’s amusement.
It was clear by this stage that the active car was significantly faster than the passive car, but reliability still had some way to go.
In June 1990 we recruited Adrian Newey, who’d been let go by Leyton House, as chief aerodynamicist and within a week he was promoted to chief designer as I could see that he needed and justified a higher level of responsibility.
He focused on the new car, the FW14. The car had strong heritage, in its visible surfaces, to the Leyton House but was further developed using the wind tunnel at Southampton University. The FW14 and 14B have often been described as Adrian Newey cars but, while he was very much responsible for the outer surfaces, and general architecture, there were a great many other people involved in the design and engineering. Adrian would be the first to accept this.
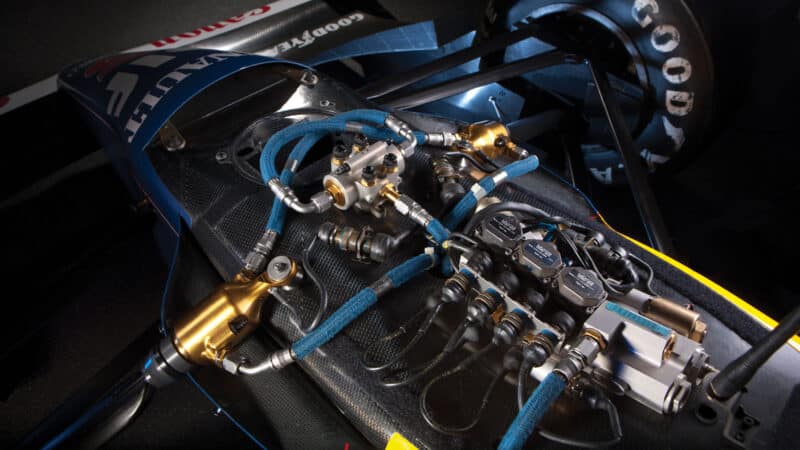
Central block shows octagonal valves: two control front ride height and roll by two-way actuators (gold) with third valve above
The test programme for the active-ride system was running in parallel, with Damon Hill driving, as Blundell was now racing in F1 for Brabham, while David Lang, Simon Wells, Paddy Lowe, Philip Farrand and Steve Wise were responsible for the various systems and their development. So, despite limited resources, this small unit kept the programme going alongside the race team and the system was by now showing great potential.
At this point we were also working with four-channel anti-lock brakes, traction control and a six-speed transverse sequential semi-automatic gearbox. Traction control was, I think, one of the easiest and most rapidly supplied 0.5-0.75sec gains in speed that has ever been applied to a racing car. Paddy Lowe joked that it took him about 15 minutes to write the code for the first system. Not quite the case, but close.
Rear wheel speeds were compared with mean front wheel speed, and if overspeed was detected a ‘cut number’ was transferred to the engine controller, the number of cylinders being ‘cut’ depending upon the level of rear overspeed.
Control strategy became more sophisticated quite quickly. By 1993 it became an emotive topic and Max Mosley saw it as some kind of evil interference by engineers. All we wanted to do was to go quicker and this was a way to do that. It was right that it was banned, though, as it did remove some skill requirements from the driver, particularly in wet or slippery conditions.